Saray Bakker
Hi! I am Saray, a PhD candidate in the Autonomous Multi-Robots lab at the department of Cognitive Robotics at TU Delft, the Netherlands. I am supervised by Javier Alonso-Mora and Wendelin Böhmer. My research focuses on motion planning for multiple mobile manipulators accounting for interaction and cooperation between other agents and humans. Feel free to contact me at s.bakker-7(at)tudelft.nl.
Before coming to Delft, I have obtained my bachelor and master degree at Eindhoven, University of Technology (NL) where I was part of the Control System Technology group, supervised by Elena Torta.

Latest News
Oct 2025 | As a co-organizer, I contributed to the workshop Perception and Planning for Mobile Manipulation in Changing Environments at IROS2025. The workshop was well-attended with 14 paper contributions and we heard many positive notes from the attendees.
Oct 2025 | I presented our RA-L paper on Globally-Guided Geometric Fabrics at IROS, website.
June 2025 | During a 4-month research visit, I was welcomed into the lab of Prof. Sylvain Calinon at the Idiap Research Institute for AI in Switzerland.
Mar 2025 | Our paper Globally-Guided Geometric Fabrics for Reactive
Mobile Manipulation in Dynamic Environments is accepted for RA-L. Paper and code available via our website.
Mar 2025 | Our paper Overcoming Explicit Environment Representations With Geometric Fabrics is accepted for RA-L. Arxiv
Jan 2025 | Our paper TamedPUMA: safe and stable imitation learning
with geometric fabrics got accepted for L4DC! Website, Arxiv
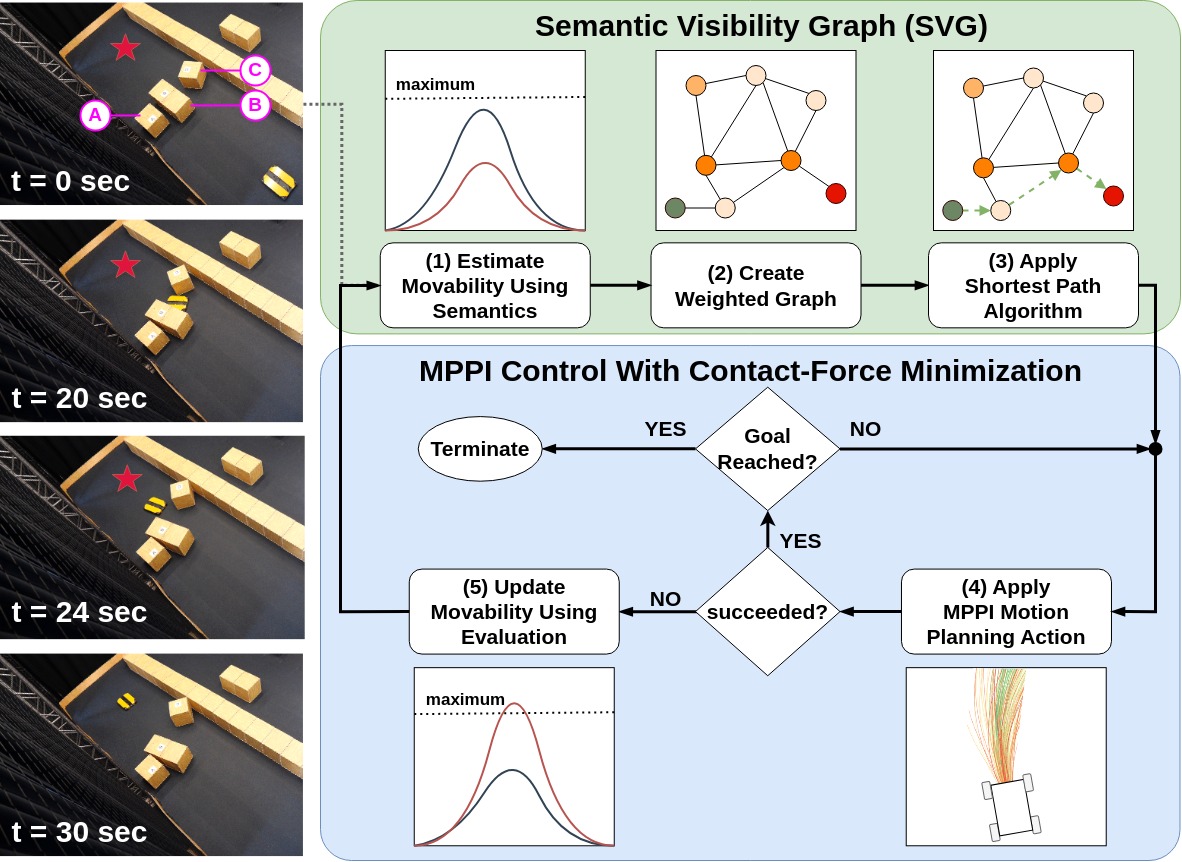
Jan 2025 | Our paper Pushing Through Clutter With Movability Awareness of Blocking Obstacles got accepted for ICRA! Arxiv
Jan 2025 | Congratulations Danning Zhao on defending her MSc thesis!
Nov 2024 | Visiting CORL in Munich and presenting our workshop paper.
Aug 2024 | Congratulations Joris Weeda on defending his MSc thesis!
July 2024 | I am presenting our work at RSS in Delft in the workshop "Structural priors as inductive biases for learning robot dynamics" and we are running a demo at the lab-tour.
Dec 2023 | Presenting our work on Multi-Robot Local Motion Planning Using Dynamic Optimization Fabrics at MRS, Boston, 2023.
Research
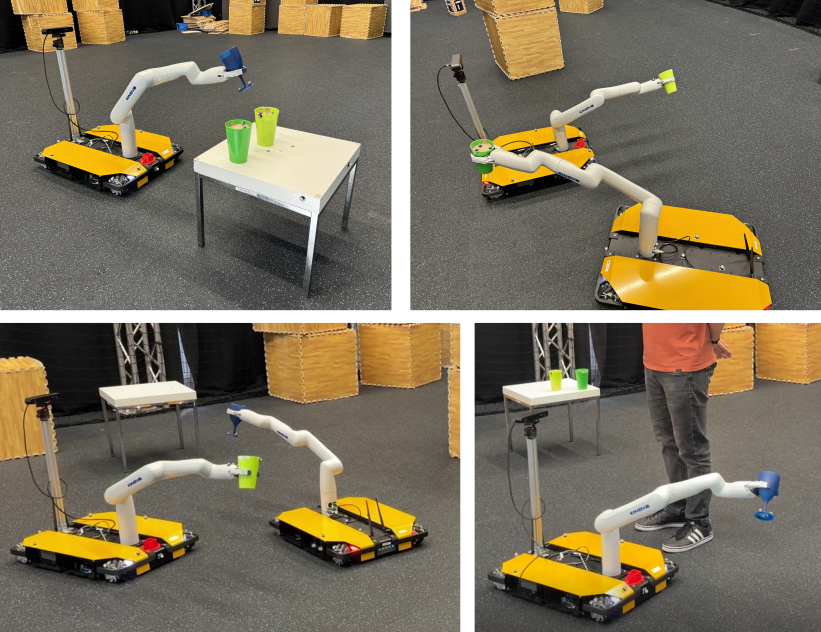
Globally-Guided Geometric Fabrics for Reactive Mobile Manipulation in Dynamic Environments
Navigation Among Movable Obstacles (NAMO) poses a challenge for traditional path-planning methods when obstacles block the path, requiring push actions to reach the goal. We propose a framework that enables movability-aware planning to overcome this challenge without relying on explicit obstacle placement. Our framework integrates a global Semantic Visibility Graph and a local Model Predictive Path Integral (SVG-MPPI) approach to efficiently sample rollouts, taking into account the continuous range of obstacle movability. A physics engine is adopted to simulate the interaction result of the rollouts with the environment, and generate trajectories that minimize contact force. In qualitative and quantitative experiments, SVG-MPPI outperforms the existing paradigm that uses only binary movability for planning, achieving higher success rates with reduced cumulative contact forces.
Globally-Guided Geometric Fabrics for Reactive Mobile Manipulation in Dynamic Environments
Globally-Guided Geometric Fabrics (G3F) is a framework for real-time motion generation along the full task horizon, by interleaving an optimization-based planner with a fast reactive geometric motion planner, called Geometric Fabrics (GF). The approach adapts the path and explores a multitude of acceptable target poses, while accounting for collision avoidance and the robot's physical constraints.
TamedPUMA: safe and stable imitation learning with geometric fabrics
Using the language of dynamical systems, Imitation learning (IL) provides an intuitive and effective way of teaching stable task-space motions to robots with goal convergence. Yet, IL techniques are affected by serious limitations when it comes to ensuring safety and fulfillment of physical constraints. With this work, we solve this challenge via TamedPUMA, an IL algorithm augmented with a recent development in motion planning called geometric fabrics.
Multi-Robot Local Motion Planning Using Dynamic Optimization Fabrics
In this paper, we address the problem of real-time motion planning for multiple robotic manipulators that operate in close proximity. We build upon the concept of dynamic fabrics and extend them to multi-robot systems, referred to as Multi-Robot Dynamic Fabrics (MRDF).
ERC project INTERACT
INTERACT aims to equip mobile robots with the ability to navigate and operate safely in human-populated environments. Leveraging advancements in motion planning, multi-robot task assignment, and machine learning, this project seeks to overcome the challenges of modeling intuition and ensuring safety in complex, uncertain settings.

MSc: Collision-free MPC for Image-Guided Therapy Robots
This MSc thesis presents a novel formulation of a model predictive control framework for autonomous navigation of large medical manipulators, such as image-guided therapy robots.