Teaching and Supervision
Master Thesis Supervision
As a daily supervisor, I have the pleasure to supervise amazing master students. Please check out their thesis and published code for more information.
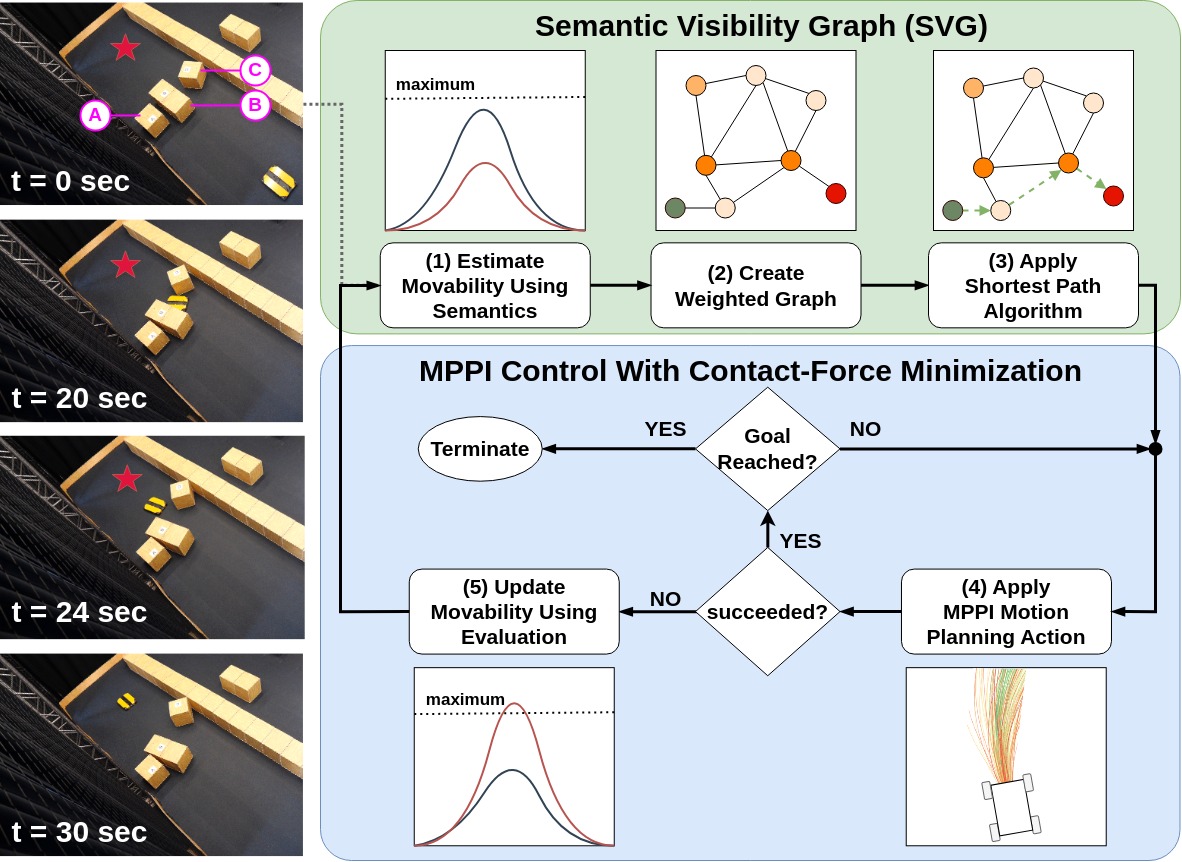
Improving indoor navigation through cluttered rooms using movability estimation
By Joris Weeda
Abstract: Navigation Among Movable Obstacles (NAMO) poses a challenge for traditional path-planning methods when obstacles block the path, requiring push actions to reach the goal. We propose a framework that enables movability-aware planning to overcome this challenge without relying on explicit obstacle placement. Our framework integrates a global Semantic Visibility Graph and a local Model Predictive Path Integral (SVG-MPPI) approach to efficiently sample rollouts, taking into account the continuous range of obstacle movability. A physics engine is adopted to simulate the interaction result of the rollouts with the environment, and generate trajectories that minimize contact force. In qualitative and quantitative experiments, SVG-MPPI outperforms the existing paradigm that uses only binary movability for planning, achieving higher success rates with reduced cumulative contact forces.
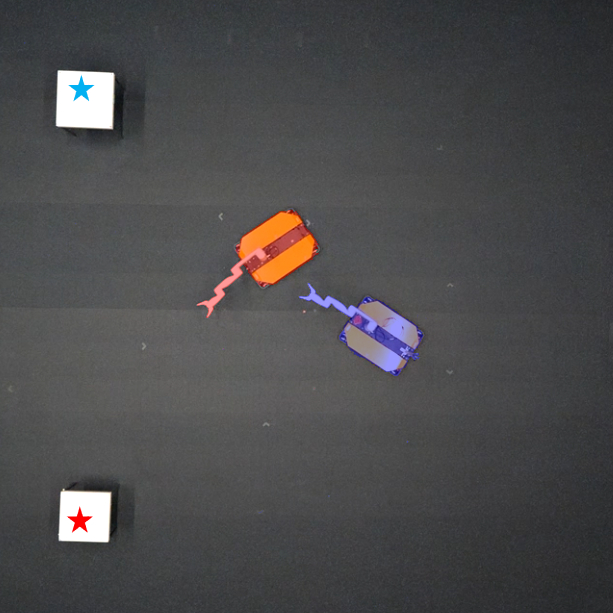
Motion planning for mobile manipulators in multi-agent settings using MPC
By Danning Zhao
Abstract: Mobile manipulators, which integrate a robotic arm on a mobile base, are increasingly being explored and deployed in sectors such as healthcare, logistics, and aerospace. While motion planning for these systems has been studied in single-agent scenarios, the use of multiple robots to enhance efficiency and accelerate task completion in multi-agent settings remains largely unexplored. This thesis proposes a decentralized Model Predictive Control (MPC) framework with a double integrator dynamic model (MPC-d) tailored for multi-mobile manipulators operating in shared workspaces. It integrates optimization-based planning with robust state estimation and a prioritized heuristic to resolve potential livelocks. The framework is validated in simulation and real-world experiments, demonstrating effective collision avoidance and improved efficiency.

Statistical Runtime Verification for Geometric Motion Planning
By Leon Kehler
Abstract: As robots increasingly operate in human environments, their controllers must ensure safe and reliable behavior under real-time constraints. Although optimization-based motion planners can enforce hard safety constraints, their computational demands limit their use on complex robotic platforms. This thesis introduces a runtime verification algorithm, Scenario-Shield, that adapts the geometric planner’s underlying dynamical system to expand its finite-time region of attraction by sampling nearby configurations and using statistical uncertainty quantification for efficient membership testing. Implementations and experiments demonstrate improved reliability over baseline controllers.